
Discover The Magic Of Stereo Cameras: Groundbreaking Techniques For Perfect 3D Depth Sensing
Stereo vision is a fundamental technique in computer vision that enables machines to perceive depth by mimicking human binocular vision...

3 Critical VIO Problems & How to Fix Them
Explore the three-phase nature of VIO systems (overhead/robustness/accuracy) and worldview construction challenges. Learn how ORB-SLAM3, VINS-MONO and DM-VIO address these issues with practical deployment strategies.

How RGB-D Cameras Are Revolutionizing Automation: A Complete Guide
Discover how RGB-D cameras revolutionize automation. Learn their working principles, key applications in robotics, logistics, and AR/VR.

As Level 3 Autonomy Goes Mainstream, Will Spatial Camera Replace Traditional Vision in ADAS?
With Level 3 autonomous driving gaining regulatory approval across Europe, Japan, and parts of the U.S., the spatial camera is receivin...

How to Fix VIOVINSVSLAM Issues: Complete Guide
Comprehensive guide to diagnosing and fixing VIO/VINS/VSLAM issues—scale drift, IMU errors, calibration, and optimization. Learn best practices for monocular & binocular systems.
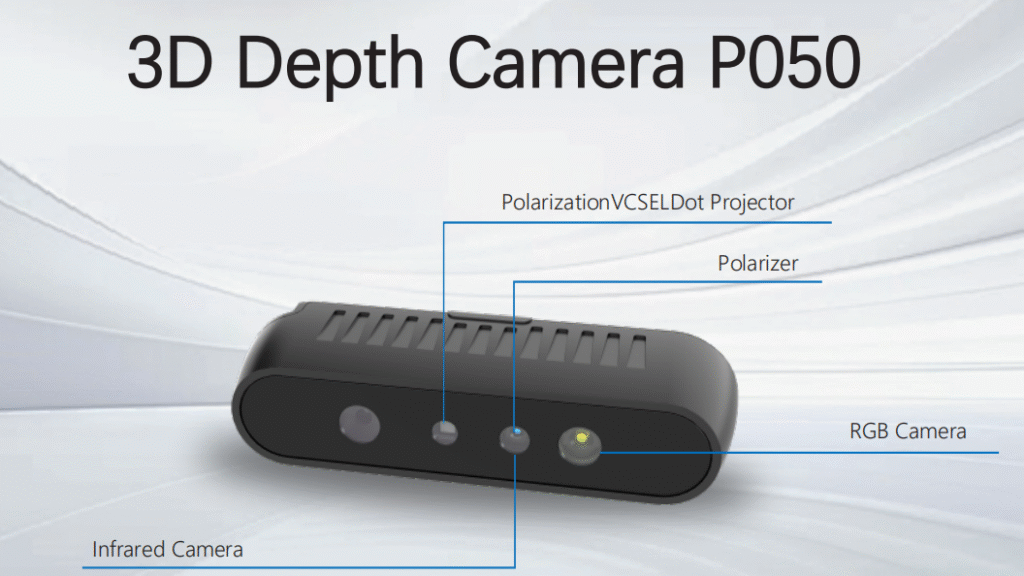
Depth Camera:How To Choose a 3D Depth Camera?
Struggling to pick a 3D depth camera? Compare structured light, ToF, and stereo vision technologies. Learn how iHawkP100R/P050 achieve millimeter-level accuracy for robotics, AR, and industrial applications
The Explosive Rise Of Spatial Cameras: Unlocking $3.5B Growth By 2030
Vision bridges humanity to the world. Today, spatial cameras are equipping this bridge with depth sensing—allowing devices not just to ...

What is the Fundamental Issues of Visual-Inertial Odometry?2 Critical Challenges
Explore Visual-Inertial Odometry (VIO) challenges: accuracy vs. overhead trade-offs. Discover key solutions like ICEBA, DMVIO backend optimization, and ZUPT for robust 3D pose estimation in robots and XR devices.

What Problems Does ZUPT Solve in VIO/VSLAM? Tuning Tips and Practical Fixes
Facing VIO/VSLAM challenges in extreme conditions? This guide reveals how ZUPT offers practical solutions for drift, visual blind spots, high-speed motion, and more. Get expert tuning tips.

How to Build VIO & VSLAM Systems: Lessons from the Field
If you’re developing autonomous robots, drones, or AR/VR devices, you’ve likely looked into VIO (Visual-Inertial Odometry) and VSLAM (V...