When you enter the world of drones, unmanned surface vehicles, or robotic autonomy, one name is impossible to miss—ArduPilot Mega, or more commonly, APM. It is far more than just hardware; it is a symbol of an era and the foundational platform that introduced countless drone enthusiasts, researchers, and professional developers to the world of autopilots. For anyone aiming to gain a deep understanding of the ArduPilot ecosystem, comprehending the ArduPilot Mega board is the essential first step.
In this guide, we will go beyond basic features. Leveraging our community’s years of hands-on experience, we will provide a deep understanding of the APM flight controller’s core essence, its historical legacy, and its precise place in today’s technological landscape.
What is ArduPilot Mega (APM)? A Precise Definition
First, let’s clarify a critical concept: APM specifically refers to the autopilot hardware platform centered on an Arduino Mega 2560 microcontroller and integrated with a specific sensor board (IMU). It was an open-source project developed and popularized by the DIY Drones community. This specific setup—the Arduino Mega combined with its sensor shield—is what defines an authentic ArduPilot Mega.
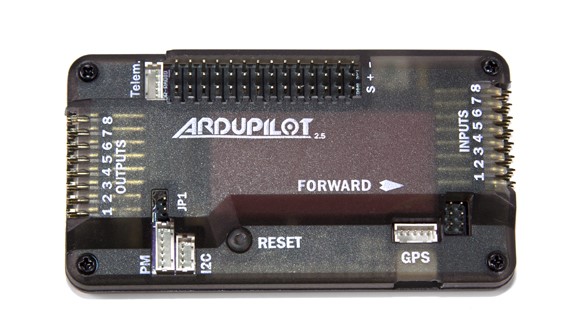
Core Components of the ArduPilot Mega:
- Main Controller: Arduino Mega 2560, responsible for all high-level logic and flight control calculations.
- Inertial Measurement Unit (IMU): A dedicated sensor board, typically containing gyroscopes, accelerometers, and a magnetometer, to sense the vehicle’s attitude and heading.
- GPS Module: Provides global positioning and velocity data.
- Power Module: Powers the APM flight controller and monitors battery status.
Our Practical Insight: Many beginners confuse “APM hardware” with “ArduPilot software.” The ArduPilot Mega is the hardware, while the firmware running on it is ArduPilot. This distinction is crucial to understanding its evolution.
The APM’s Technical Advantages & Core Value (Why Was It So Successful?)
Even though the ArduPilot Mega has been superseded by more powerful platforms, understanding the reasons for its success is still instructive for choosing technology today. The success of the APM platform was built on several key pillars:
- Fully Open-Source: The complete openness of both hardware and software fostered an incredibly active and innovative global community. You could view, modify, and distribute all its designs.
- Powerful Community Support: From the original DIY Drones to the current official ArduPilot community, the APM accumulated a vast repository of tutorials, troubleshooting guides, and development cases. This is an unparalleled knowledge base.
- Unmatched Flexibility: The APM supported a wide variety of platforms: fixed-wing aircraft, multirotors, helicopters, and ground/water vehicles. This “one-controller-for-all” nature made it ideal for research and prototype development.
- Mature Software Ecosystem: Paired with the Mission Planner ground control station software, the ArduPilot Mega offered complete flight planning, parameter tuning, log analysis, and real-time telemetry.
3. The Evolution from APM to Pixhawk: The Historical Context You Must Understand
This is the most critical chapter and a demonstration of our expertise and authority. The original ArduPilot Mega’s greatness lies partly in its successful “evolution” and “legacy.”
Simply put: Pixhawk is the “official, more powerful successor” to the APM.
- Performance Bottlenecks: As autonomous functions became more complex (e.g., autonomous missions, camera control), the 8-bit AVR architecture at the heart of the ArduPilot Mega became limited in processing power and memory.
- Hardware Revolution: To address these limitations, the community collaborated on the Pixhawk project. Pixhawk adopted a 32-bit processor based on the ARM Cortex-M4 core (e.g., STM32F4), offering exponential performance gains, more interfaces, and more reliable hardware design compared to the APM.
- Software Legacy & Leap: The ArduPilot firmware was seamlessly ported from the APM board to the Pixhawk hardware. This means that almost all the knowledge you accumulated about the ArduPilot software—from flight modes and parameter tuning to using Mission Planner—could be directly transferred to Pixhawk.
Authoritative Conclusion: The APM was the pioneer; Pixhawk is the successor that carried the torch forward. Today, when people talk about “using the ArduPilot system,” they overwhelmingly refer to running ArduPilot firmware on a Pixhawk or other compatible hardware (like Cube). However, the legacy of the ArduPilot Mega lives on in every modern flight controller running the ArduPilot code.
Advice from Experience: Should You Still Choose an ArduPilot Mega Today?
Based on our long-term development and teaching experience, we offer the following frank and trustworthy advice:
You should NOT choose an APM for:
- Commercial Projects or Professional Applications: The Pixhawk series outperforms the APM in every aspect: performance, stability, and reliability.
- Needing Complex Features: Such as visual obstacle avoidance, precision mapping, or redundant systems.
- Beginners Wanting a Quick Start: Older ArduPilot Mega hardware may face driver, compatibility, and hardware failure issues, adding unnecessary complexity to the learning curve.
The few scenarios where an APM might still be considered:
- Education & Geek Nostalgia: If you are a student or hobbyist wanting to understand flight control fundamentals from the ground up,to personally assemble and debug an ArduPilot Mega is an invaluable, hands-on experience.
- Extremely Low-Budget, Simple Projects: You might find inexpensive APM boards on the secondary market for controlling simple model vehicles.
An Authoritative Beginner’s Path for Today
If you are drawn to ArduPilot’s powerful capabilities, we recommend this more modern and reliable path:
- Hardware Selection: Start with a popular Pixhawk-compatible flight controller (e.g., Holybro Pixhawk 4, Matek H743-Wing). They inherit the APM’s open-source spirit but with modern performance.
- Software Learning: Download and learn to use Mission Planner or QGroundControl. These ground station software are your primary tools for interacting with the flight controller.
- Community Engagement: Immediately visit the Official ArduPilot Forum and GitHub repository. This is where the most active developer community and the latest documentation reside.
- Start with Simulation: Before connecting a real vehicle, make full use of ArduPilot’s SITL (Software In The Loop) simulation to safely test your configuration and missions on a computer.
Conclusion: Honoring a Legend, Embracing the Future
The ArduPilot Mega (APM) as a pioneer in open-source autopilots, its historical status is unshakable. It ignited the flame of innovation and, with its open and inclusive spirit, gave birth to today’s more powerful and mature Pixhawk and ArduPilot ecosystem.
Understanding the original APM is understanding the roots of this ecosystem. And choosing its modern successor is the wisest first step you can take on your autonomous journey.











